Controlli automatici/Sistemi di controllo digitali
Sistema di controllo digitale
modifica
Campionatore
modificaIl campionatore è un convertitore A/D che genera in uscita la sequenza di campioni con passo di campionamento a partire dall'errore di inseguimento :



- nel dominio del tempo:
- nel dominio della trasformata zeta:
- nel dominio della trasformata di Laplace:



Il passo di campionamento deve essere sufficientemente piccolo:
- il teorema del campionamento impone una pulsazione di campionamento maggiore del doppio della pulsazione di banda :
- la riduzione del margine di fase introdotta dal ricostruttore deve essere contenuta:





Il passo di campionamento non deve essere troppo piccolo, per non incorrere in:
- problemi di quantizzazione;
- necessità di utilizzare processori costosi per garantire elevate prestazioni.
Ricostruttore
modifica
Il ricostruttore è un convertitore D/A che genera il comando a partire dalla sua sequenza di campioni . Il filtro Z.O.H. di ordine zero mantiene nell'intervallo il comando pari al valore dell'ultimo campione acquisito. La funzione di trasferimento del filtro Z.O.H. si può approssimare a una funzione razionale tramite l'approssimazione di Padè del I ordine:



La risposta all'impulso del filtro Z.O.H.:


è pari alla sua funzione di trasferimento:
- all'ingresso:
- all'uscita:


Approssimando il termine esponenziale della funzione di trasferimento :

La funzione di trasferimento del filtro Z.O.H. ha un polo in che crea una perdita di fase in corrispondenza della pulsazione di taglio , cioè una riduzione del margine di fase . Riducendo via via il passo di campionamento , il polo si sposta ad una pulsazione sufficientemente elevata rispetto alla pulsazione di taglio con conseguente riduzione della perdita del margine di fase .


Controllore digitale
modificaIl controllore digitale è definito dalla sua funzione di trasferimento nel dominio della trasformata zeta, che è calcolabile tramite un metodo di discretizzazione a partire dalla funzione del controllore analogico.


- Metodi di approssimazione dell'integrazione nel tempo
-
 Metodo delle differenze all'indietro
Metodo delle differenze all'indietro -
 Metodo delle differenze in avanti
Metodo delle differenze in avanti -
 Trasformazione bilineare o di Tustin
Trasformazione bilineare o di Tustin



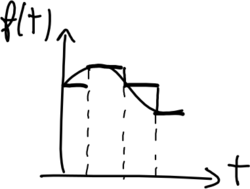
- metodo delle differenze all'indietro: approssima mantenendo costante l'ultimo campione:
- metodo non valido: genera forti distorsioni
- metodo delle differenze in avanti: approssima mantenendo costante il prossimo campione:
- metodo non valido: non garantisce la stabilità di ottenuta a partire da stabile
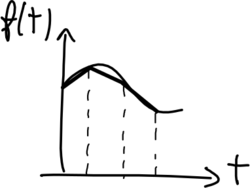
- trasformazione bilineare (o di Tustin): approssima tramite trapezi:
- metodo valido: genera distorsioni ridotte, e garantisce la stabilità di ottenuta a partire da stabile
- trasformazione bilineare con precompensazione in frequenza: precalcola e compensa la distorsione alla pulsazione di taglio :
- metodo valido: genera distorsioni molto ridotte, e garantisce la stabilità di ottenuta a partire da stabile
- Altri metodi
- metodo di invarianza della risposta all'impulso: garantisce che a fronte di un medesimo ingresso ad impulso la sequenza di campioni all'uscita di coincida con la sequenza di valori assunti negli istanti di campionamento dall'uscita di :
- metodo non valido: non garantisce l'assenza di aliasing
- metodo di invarianza della risposta al gradino: garantisce che a fronte di un medesimo ingresso a gradino la sequenza di campioni all'uscita di coincida con la sequenza di valori assunti negli istanti di campionamento dall'uscita di , ed è equivalente a considerare in cascata a un fittizio filtro Z.O.H.:
Dato un ingresso a gradino , l'uscita del controllore analogico , campionata agli istanti di campionamento, coincide con l'uscita del controllore digitale :



Applicare il metodo di invarianza della risposta al gradino è matematicamente equivalente a fare la trasformata zeta di in cascata ad un fittizio Z.O.H.:

- metodo valido: garantisce l'assenza di aliasing
- metodo della corrispondenza poli-zeri: calcola direttamente i poli e gli zeri di a partire da quelli di ( ):
- metodo valido

Progetto per la realizzazione del controllore digitale
modifica- si sceglie il passo di campionamento :
- si considera come prima scelta un valore dell'ordine di qualche millisecondo:
- si valuta il nuovo margine di fase della funzione d'anello corrispondente alla cascata del campionatore, del controllore e del filtro Z.O.H. approssimato (basta introdurre il termine a denominatore della funzione d'anello del sistema da controllare);
- se il margine di fase risulta insufficiente, si riduce il passo di campionamento per quanto possibile;
- si considera come prima scelta un valore dell'ordine di qualche millisecondo:
- si sceglie un metodo di discretizzazione e si calcola la funzione del controllore digitale a partire da ;
- si verifica il comportamento del sistema complessivo in presenza del controllore digitale :
- analisi a tempo discreto (in frequenza e nel tempo): si trasformano in zeta la funzione d'anello e la funzione di trasferimento in catena chiusa del sistema, scegliendo il metodo di invarianza della risposta al gradino come metodo per trasformare la funzione del sistema da controllare;
- simulazione del sistema ibrido con Simulink.




